Informática para discapacitados
Hace siglos los avances tecnológicos han servido para las personas, ahora las personas que no tienen manos pueden escribir, un ciego puede leer, un mudo hablar por teléfono o una persona en silla de ruedas puede activar las persianas de su casa y controlar el servidor, hay personas que se les hace difícil manejar el ratón pero hay diversos simuladores como el joysticks, el teclado y el headmaster, pero estos son un sistema lento pero para algunos es la única manera, hay otras utilidades que ofrecen los ordenadores para que las se desenvuelvan, que les permitan dirigir la casa como por ejemplo: el volumen del televisor, cambio de canal, descolgar y colgar el teléfono, regular una
persiana, etc. La realidad virtual se puede considerar como el uso de ordenadores que le permiten alas personas introducirse en un mundo artificial ya que el usuario se pone un casco que cubre los ojos y un traje adecuado, también encuentra en su lugar en el servicio de las personas discapacitadas.
Tiflotecnologia en esta unidad la ONCE se ha ido creando un sistema que permite acceder ala información contenida en la pantalla del ordenador mediante el paso de la información el cual otro producto es pc hablado El sistema de guía personal para ciegos actualmente existen varios sistemas de guía o asistencia al invidente todos ellos centrados en evitar obstáculos (desde el perro guía a los sensores ultrasonicos) las cuales hay partes que las constan son un ordenador de bolsillo, unos audífonos, una brújula electrónica y una antena Gps en la cabeza.
Informática aplicada ala domotica
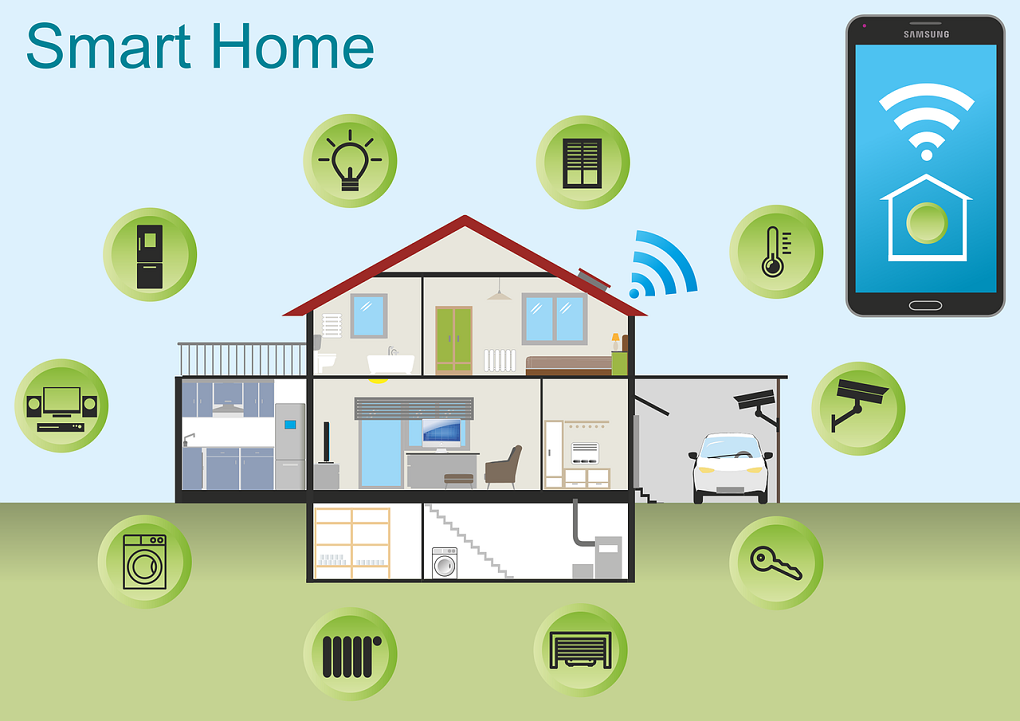
La domotica comenzó cuando a un estudiante se le ocurrió conectar dos cables eléctricos alas manecillas de un reloj despertador, para que un poco tiempo después fueran movidos por dichas manecillas y los cables cerraran un circuito constituido por una pila y una lampara, más adelante se han ido perfeccionando los sistemas, así el avance tecnológico en los procesos de fabricación y la entrada en el mercado de mejores, mas rápidos, eficientes, económicos y sobre todo más pequeños componentes electrónicos, ha permitido dichos elementos (emisores y receptores), al ser un poco más livianos, discretos y atractivos.
A continuación se muestran algunos conceptos de la domótica:
Controlador: aparato electrónico emisor de señales enchufado ala red eléctrica con una serie de teclas de control, a cada una de estas teclas corresponde a un código de unidad.
Módulo receptor: pequeño aparato receptor enchufado ala red eléctrica que actúa de intermediario entre el controlador y el electrodoméstico a controlar.
Modulo de iluminación: diseñado exclusivamente para control de iluminación, ya que tiene un ''dimmer'' interno, mediante el cual se puede variar la intensidad de brillo de la luz, además de permitir el encendido y apagado directo.
Modulo de potencia: su función únicamente es la de encendido y apagado. En vez de ''dimmer'' tiene un potente relé y no presenta ningún tipo de restricción en cuanto alos aparatos que se pueden enchufar, salvo el de no sobrepasar su potencia máxima.
Código de casa: corresponde aun código formado por una letra (desde la A ala P), que llevan tanto los controladores como los módulos, y que determina el código general que llevaran todos los elementos que trabajen en conjunto y se comuniquen dentro de una
misma casa.
Red eléctrica: la instalación eléctrica que existe en todas las viviendas constituye la vía mediante la cual se comunican todos los elementos de automatización.
Con la domotica se pueden automatizar todo tipo de viviendas locales. seguridad, detención de fugas de gas y agua , detención de intrusos, simulación de presencia, alerta medica, ahorro energético, etc. todo esto se puede hacer debido ala domotica que hoy en día ha evolucionado demasiado.
Informática aplicada ala robótica

Las industrias quieren conseguir productos de una calidad uniforme haci que están dando un giro para hacer una automatización basado en el ordenador, así que han decidido crear un robot que este compuesto de un brazo y una muñeca más una más una herramienta que la han diseñado como una pieza de trabajo, de algunos de los robots que están disponibles los utilizan para tareas de fabricación y ensamblaje así como el manejo de material, soldaduras por arco y de punto, montajes de piezas, pintura, carga y descarga de las maquinas, investigación de brazos prostésicos y en el manejo de materiales peligrosos, en estas hay 3 categorías de movimientos básicos: coordenadas cartesianas, coordenadas cilíndricas y coordenadas esféricas, hoy en día los robots son controlados por mini y micro ordenadores que simplemente son máquinas posicionales, al comienzo de 1958 Ernst publicó el desarrollo de la mano mecánica controlada por ordenadores con sensores táctiles, en ese mismo año tomovic y boni desarrollaron una mano prototipo provista con un sensor de presión que detectaba el objeto y proporcionaba una señal de re alimentación, cuando finalizo los años 70, McCarthy y sus colegas desarrollaron un ordenador con manos, ojos y oídos ( manipuladores, cámaras tv y micrófonos) que demostraron que reconocían hablados, bloques distribuidos, etc. 

En 1921 se desarrollo un brazo llamado Boston y al siguiente año el brazo stanford, que venia equipado con una cámara que iva controlado por los ordenadores. La visión de un robot se define como un proceso de extraer, caracterizar e interpretar información de imágenes, la visión de esta maquina se puede subdividir en 6 áreas principales: sensor, prepocesamiento, segmentación, descripción, reconocimiento y pintura al spray, también para efectuar tareas de montaje que requieren técnicas de programación de alto nivel.